pool
This module contains the main pool class
Functions
|
Classes
Pool
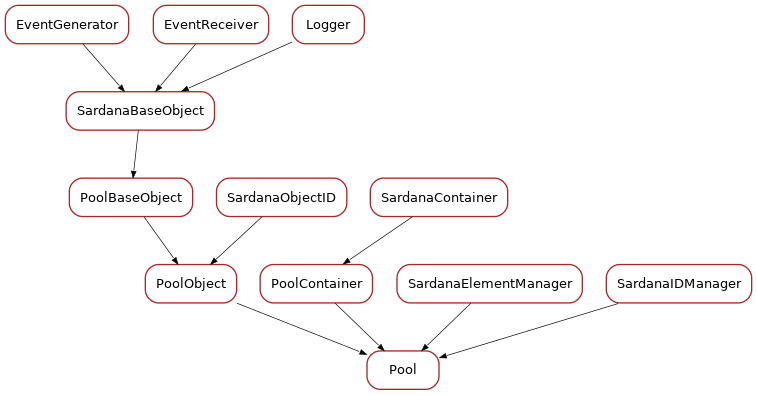
- class Pool(full_name, name=None)[source]
Bases:
PoolContainer,PoolObject,SardanaElementManager,SardanaIDManagerThe central pool class.
- Default_MotionLoop_StatesPerPosition = 10
Default value representing the number of state reads per position read during a motion loop
- Default_MotionLoop_SleepTime = 0.01
Default value representing the sleep time for each motion loop
- Default_AcqLoop_StatesPerValue = 10
Default value representing the number of state reads per value read during a motion loop
- Default_AcqLoop_SleepTime = 0.01
Default value representing the sleep time for each acquisition loop
- Default_DriftCorrection = True
- property motion_loop_sleep_time
motion sleep time (s)
- property motion_loop_states_per_position
Number of State reads done before doing a position read in the motion loop
- property acq_loop_sleep_time
acquisition sleep time (s)
- property acq_loop_states_per_value
Number of State reads done before doing a value read in the acquisition loop
- property drift_correction
drift correction
- property monitor
- property ctrl_manager
- property pool_path