PseudoMotor
Classes
PseudoMotor
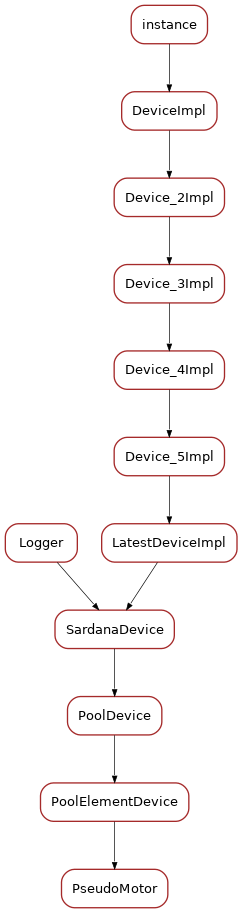
- class PseudoMotor(dclass, name)[source]
Bases:
PoolElementDevice- ignore_memorized_attrs_during_initialization = ('Position',)
- init(name)[source]
initialize the device once in the object lifetime. Override when necessary but always call the method from your super class
- Parameters:
name – device name
- property pseudo_motor
- delete_device()[source]
Clean the device. Called during shutdown and every time the tango
Initcommand is executed. Override when necessary but always call the method from your super class
- init_device()[source]
Initialize the device. Called during startup after
init()and every time the tangoInitcommand is executed. Override when necessary but always call the method from your super class
- always_executed_hook(self)[source]
Hook method.
Default method to implement an action necessary on a device before any command is executed. This method can be redefined in sub-classes in case of the default behaviour does not fullfill the needs
- Raises:
DevFailed – This method does not throw exception but a redefined method can.
- get_dynamic_attributes()[source]
Override of
PoolDevice.get_dynamic_attributes. Returns the standard dynamic and fully dynamic attributes for this device. The return is a tuple of two dictionaries:standard attributes: caseless dictionary with key being the attribute name and value is a tuple of attribute name(str), tango information, attribute information
dynamic attributes: caseless dictionary with key being the attribute name and value is a tuple of attribute name(str), tango information, attribute information
- tango information
seq<
CmdArgType,AttrDataFormat,AttrWriteType>- attribute information
attribute information as returned by the sardana controller
- Returns:
the standard dynamic and fully dynamic attributes
- CalcPseudo(physical_positions)[source]
Returns the pseudo motor position for the given physical positions
- CalcPhysical(pseudo_position)[source]
Returns the physical motor positions for the given pseudo motor position assuming the current pseudo motor write positions for all the other sibling pseudo motors
- CalcAllPhysical(pseudo_positions)[source]
Returns the physical motor positions for the given pseudo motor position(s)
- CalcAllPseudo(physical_positions)[source]
Returns the pseudo motor position(s) for the given physical positions
- is_Position_allowed(req_type)
Generic is_allowed
PseudoMotorClass
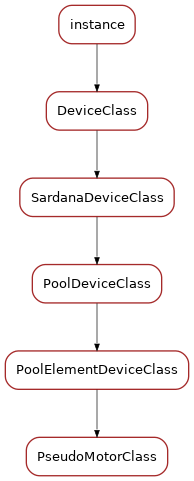
- class PseudoMotorClass(name)[source]
Bases:
PoolElementDeviceClass- class_property_list = {}
Sardana device class properties definition
- device_property_list = {'Axis': [tango._tango.CmdArgType.DevLong64, 'Axis in the controller', [0]], 'Ctrl_id': [tango._tango.CmdArgType.DevString, 'Controller ID', [0]], 'DriftCorrection': [tango._tango.CmdArgType.DevBoolean, 'Locally apply drift correction on pseudo motors. Default is the current global drift correction in the Pool Device', None], 'Force_HW_Read': [tango._tango.CmdArgType.DevBoolean, 'Force a hardware read of value even when in operation (motion/acquisition', False], 'Id': [tango._tango.CmdArgType.DevLong64, 'Internal ID', 0], 'Instrument_id': [tango._tango.CmdArgType.DevString, 'Instrument ID', [0]]}
Sardana device properties definition
- cmd_list = {'Abort': [[tango._tango.CmdArgType.DevVoid, ''], [tango._tango.CmdArgType.DevVoid, '']], 'CalcAllPhysical': [[tango._tango.CmdArgType.DevVarDoubleArray, 'pseudo positions'], [tango._tango.CmdArgType.DevVarDoubleArray, 'physical positions']], 'CalcAllPseudo': [[tango._tango.CmdArgType.DevVarDoubleArray, 'physical positions'], [tango._tango.CmdArgType.DevVarDoubleArray, 'pseudo positions']], 'CalcPhysical': [[tango._tango.CmdArgType.DevDouble, 'pseudo position'], [tango._tango.CmdArgType.DevVarDoubleArray, 'physical positions']], 'CalcPseudo': [[tango._tango.CmdArgType.DevVarDoubleArray, 'physical positions'], [tango._tango.CmdArgType.DevDouble, 'pseudo position']], 'MoveRelative': [[tango._tango.CmdArgType.DevDouble, 'amount to move'], [tango._tango.CmdArgType.DevVoid, '']], 'Release': [[tango._tango.CmdArgType.DevVoid, ''], [tango._tango.CmdArgType.DevVoid, '']], 'Restore': [[tango._tango.CmdArgType.DevVoid, ''], [tango._tango.CmdArgType.DevVoid, '']], 'Stop': [[tango._tango.CmdArgType.DevVoid, ''], [tango._tango.CmdArgType.DevVoid, '']]}
Sardana device command definition
- standard_attr_list = {'Position': [[tango._tango.CmdArgType.DevDouble, tango._tango.AttrDataFormat.SCALAR, tango._tango.AttrWriteType.READ_WRITE], {'abs_change': '1.0', 'label': 'Position'}]}