poolpseudomotor
This module is part of the Python Pool library. It defines the PoolPseudoMotor class
Classes
PoolPseudoMotor
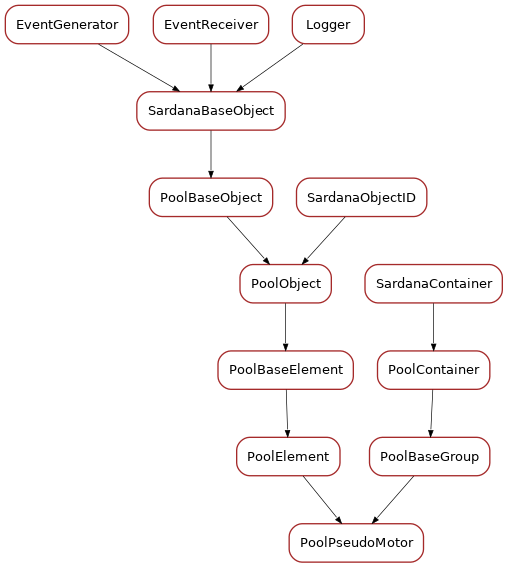
- class PoolPseudoMotor(**kwargs)[source]
Bases:
PoolBaseGroup,PoolElementA class representing a Pseudo Motor in the Sardana Device Pool
- property drift_correction
drift correction
- property siblings
the siblings for this pseudo motor
- get_physical_positions(cache=True, propagate=1)[source]
Get positions for underlying elements.
- Parameters:
- Return type:
- Returns:
the physical positions
- get_siblings_positions(use=None, write_pos=True)[source]
Get the last positions for all siblings. If write_pos is True and a sibling has already been moved before, it’s last write position is used. Otherwise its read position is used instead.
- Parameters:
use (
Optional[Dict[PoolElement,SardanaValue]]) – the already calculated positions. If a sibling is in this dictionary, the position stored here is used insteadwrite_pos (
bool) – determines if should try to use the last set point [default: True]
- Return type:
- Returns:
a dictionary with siblings write positions
- get_position(cache=True, propagate=1)[source]
Returns the user position.
- Parameters:
- Return type:
- Returns:
the user position
- set_write_position(w_position, timestamp=None, propagate=1)[source]
Sets a new write value for the user position.
- property position: SardanaAttribute
pseudo motor position
- calculate_state_info(status_info=None)[source]
Transforms the given state information. This specific base implementation transforms the given state,status tuple into a state, new_status tuple where new_status is “self.name is state plus the given status. It is assumed that the given status comes directly from the controller status information.
- Parameters:
status_info – given status information [default: None, meaning use current state status.
- Returns:
a transformed state information
- property motion
motion object