poolmotor
This module is part of the Python Pool libray. It defines the base classes for
Classes
PoolMotor
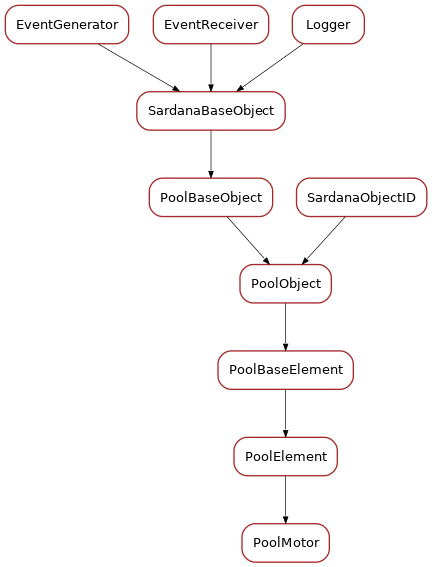
- class PoolMotor(**kwargs)[source]
Bases:
PoolElementAn internal Motor object. NOT part of the official API. Accessing this object from a controller plug-in may lead to undetermined behavior like infinite recursion.
- calculate_state_info(state_info=None)[source]
Transforms the given state information. This specific base implementation transforms the given state,status tuple into a state, new_status tuple where new_status is “self.name is state plus the given status. It is assumed that the given status comes directly from the controller status information.
- Parameters:
status_info – given status information [default: None, meaning use current state status.
- Returns:
a transformed state information
- inspect_limit_switches()[source]
returns the current (cached value of the limit switches
- Returns:
the current limit switches flags
- get_limit_switches(cache=True, propagate=1)[source]
Returns the motor limit switches state.
- Parameters:
- Return type:
- Returns:
the motor limit switches state
- property limit_switches: SardanaAttribute
motor limit switches
- property instability_time
motor instability time
- property backlash
motor backlash
- property offset
motor offset
- property sign
motor sign
- property step_per_unit
motor steps per unit
- property acceleration
motor acceleration
- property deceleration
motor deceleration
- property base_rate
motor base rate
- property velocity
motor velocity
- get_position_attribute()[source]
Returns the position attribute object for this motor
- Return type:
- Returns:
the position attribute
- get_position(cache=True, propagate=1)[source]
Returns the user position.
- Parameters:
- Return type:
- Returns:
the user position
- set_write_position(w_position, timestamp=None, propagate=1)[source]
Sets a new write value for the user position.
- read_dial_position()[source]
Reads the dial position from hardware.
- Return type:
- Returns:
a
SardanaValuecontaining the dial position
- put_dial_position(dial_position_value, propagate=1)[source]
Sets a new dial position.
- Parameters:
dial_position_value (
SardanaValue) – the new dial position valuepropagate (
int) – 0 for not propagating, 1 to propagate, 2 propagate with priority
- Return type:
DialPosition
- get_dial_position_attribute()[source]
Returns the dial position attribute object for this motor
- Return type:
- Returns:
the dial position attribute
- get_dial_position(cache=True, propagate=1)[source]
Returns the dial position.
- Parameters:
- Return type:
- Returns:
the dial position
- property position: SardanaAttribute
motor user position
- property dial_position: SardanaAttribute
motor dial position
- property motion
motion object